หุ่นยนต์เชื่อม MIG คุณภาพสูงจากจีน สำหรับเชื่อมสแตนเลส







ร่างกายหุ่นยนต์
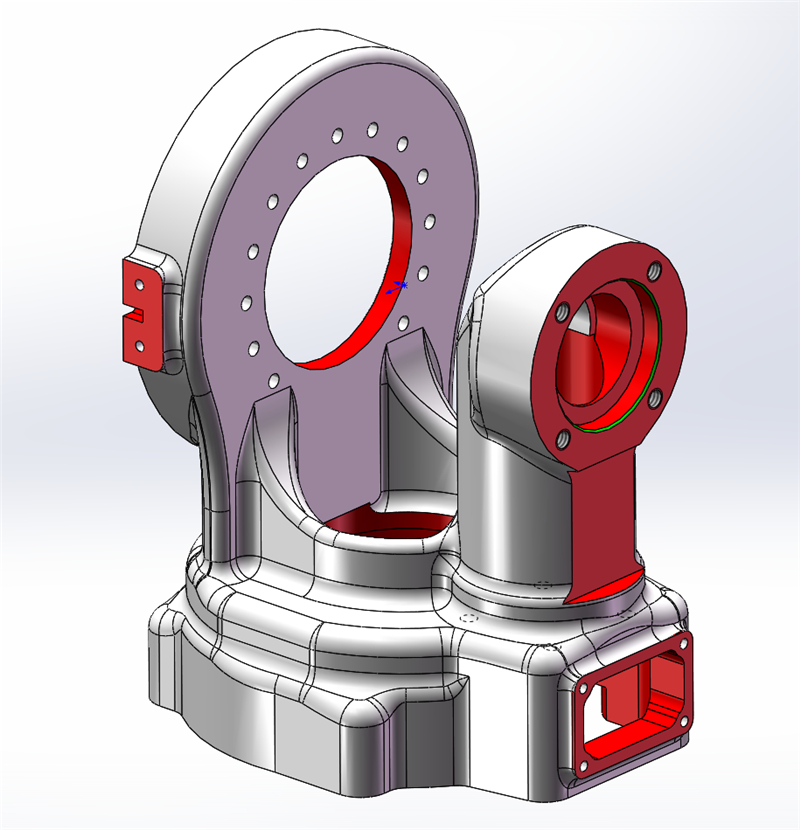
หุ่นยนต์ JHY มีการเปลี่ยนแปลงหลักๆ ในกระบวนการหล่อขึ้นรูปและการออกแบบรายละเอียดของตัวหุ่นยนต์ ทีมวิจัยและพัฒนาของเราได้สร้างสรรค์นวัตกรรมมากมายในการออกแบบตัวละครหุ่นยนต์ และได้รับสิทธิบัตรสิ่งประดิษฐ์ใหม่มากกว่าสิบรายการ
ตัวอย่างเช่น แกนที่หกได้รับการพัฒนาให้มีกลไกการส่งกำลังที่มีความแม่นยำสูงและออกแบบเหล็กเสริมแรง นอกจากนี้ จานส่งกำลังของล้อที่หกยังใช้การออกแบบแบบไร้เฟือง ซึ่งช่วยเพิ่มความแม่นยำและเสถียรภาพของหุ่นยนต์ได้อย่างมาก แม้ว่าหัวเชื่อมจะทำงานในท่าทางที่ยากลำบาก ก็ยังคงรักษาเสถียรภาพและไม่สั่นสะเทือนได้ ซึ่งได้รับการยืนยันจากลูกค้าในประเทศของเราแล้ว
ตัวหุ่นยนต์ผลิตด้วยเทคโนโลยีการหล่อขึ้นรูป ทำให้หุ่นยนต์ของเรามีความหนาแน่นสูงและน้ำหนักเบา แขนท่อนล่างสามารถแคบและยาวขึ้นได้ อัตราส่วนระหว่างแขนท่อนบนและแขนท่อนล่างใกล้เคียงกับอัตราส่วนทองคำ ทำให้เคลื่อนไหวได้คล่องตัวและรวดเร็วยิ่งขึ้น
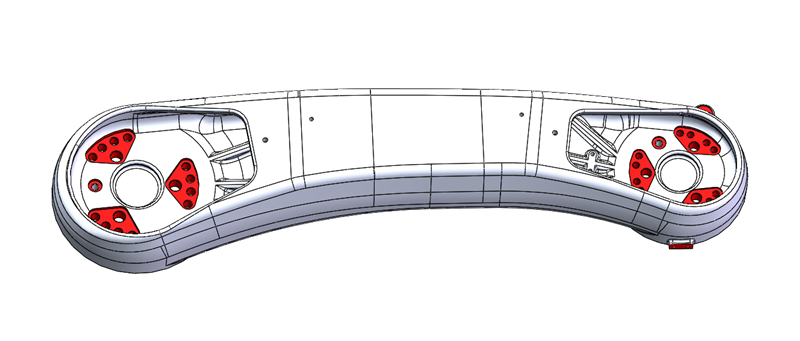
การออกแบบโครงร่าง
การออกแบบแขนหุ่นยนต์แบบตรงนั้นเรียบง่ายและสง่างามยิ่งขึ้น ด้วยดีไซน์ที่สอดคล้องกับสุนทรียภาพของตลาดในยุโรป การออกแบบตัวหุ่นยนต์ได้ยื่นขอสิทธิบัตรทางเทคนิคหลายฉบับ ทำให้ตัวหุ่นยนต์ใหม่นี้สมบูรณ์แบบยิ่งขึ้น
แบรนด์สายไฟชั้นนำ
สายไฟและขั้วต่อภายในของหุ่นยนต์ผลิตโดยแบรนด์ชั้นนำของญี่ปุ่น ได้แก่ DYEDEN และ TAIYO ซึ่งเป็นแบรนด์เดียวกับ ABB และ Fanuc
หัวต่อ: ยี่ห้อ Yierma จากอิตาลี
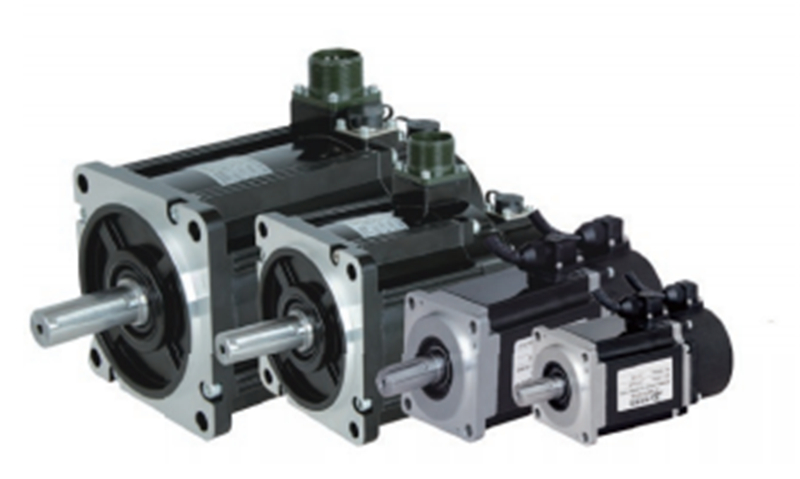
แบรนด์ชั้นนำของเซอร์โวมอเตอร์ / ไดรเวอร์ / รีดิวเซอร์
ชิ้นส่วนทั้งหมดเลือกใช้แบรนด์ชั้นนำของจีน โดยแต่ละแบรนด์ได้รับการทดสอบและตรวจสอบมาเป็นเวลานานก่อนที่จะตัดสินใจเลือกใช้ เพื่อให้มั่นใจว่าแบรนด์เหล่านั้นเหมาะสมกับการใช้งานของหุ่นยนต์ของเรา และมีคุณภาพและประสิทธิภาพที่เสถียรและเชื่อถือได้
แกน J1 และ J2 ใช้การออกแบบเพลาเยื้องศูนย์สามตัวที่มีแรงบิดสูงถึง 65 นิวตันเมตร ซึ่งช่วยลดการสึกหรอของเฟืองและเพิ่มอายุการใช้งานของตัวลดเกียร์ ปัจจุบัน ตัวลดเกียร์แกน J1 และ J3 ของหุ่นยนต์ JHY เป็นรุ่นที่มีการกำหนดค่าสูงสุดในประเทศจีน
เกี่ยวกับมอเตอร์เซอร์โว ปัจจุบันเราใช้มอเตอร์ขนาด 3 กิโลวัตต์เป็นอย่างมากสำหรับหุ่นยนต์
สำหรับหุ่นยนต์ขนาด 1.8 เมตรและ 2 เมตร แรงขับที่จำเป็นสำหรับแกนที่ 1 และ 2 จะมากกว่า และความต้องการกำลังมอเตอร์ก็สูงกว่าด้วย
มอเตอร์ที่มีความแม่นยำสูงและมีคุณสมบัติหลากหลายสามารถตอบสนองความต้องการใช้งานของหุ่นยนต์ของเราได้อย่างเต็มที่

รับประกัน 3 ปี/7500 ชั่วโมง ไม่ต้องบำรุงรักษา
การบำรุงรักษาทำได้ง่าย ลูกค้าสามารถใช้งานเองได้อย่างสะดวก
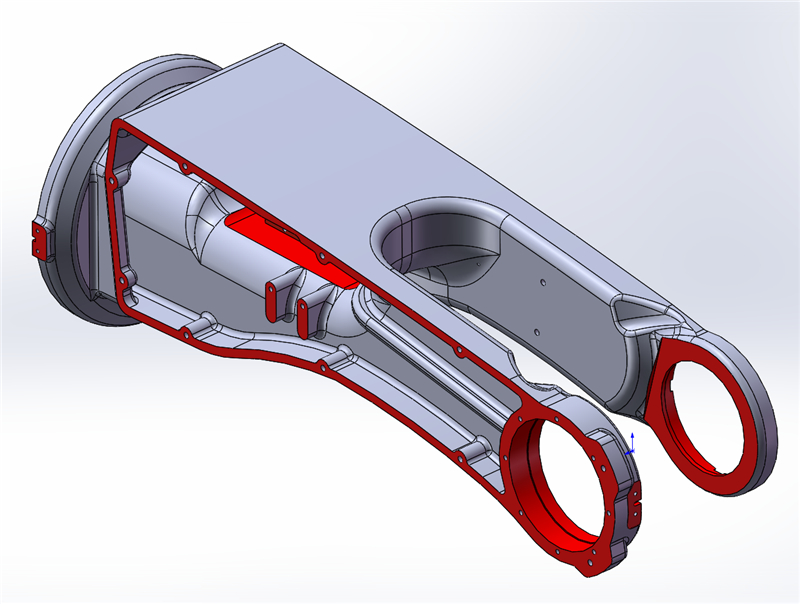
สิทธิบัตรและการออกแบบอื่นๆ
ระบบส่งกำลังรอง 6 แกน เปลี่ยนมาใช้สายพานสองเส้น เพิ่มอัตราส่วนการส่งกำลัง และแก้ปัญหาการเคลื่อนที่เร็วเกินไปและไม่แม่นยำของแกนที่ 6 จานส่งกำลังของแกนที่หกได้รับการออกแบบโดยไม่มีเฟือง ใช้กลไกการส่งกำลังที่มีความแม่นยำสูง ซึ่งช่วยปรับปรุงความแม่นยำในการเคลื่อนที่ของแกนที่หก... ปัจจุบันเรามีสิทธิบัตรที่เกี่ยวข้องกับหุ่นยนต์เชื่อมมากกว่า 30 ฉบับ
วิดีโอ
พารามิเตอร์
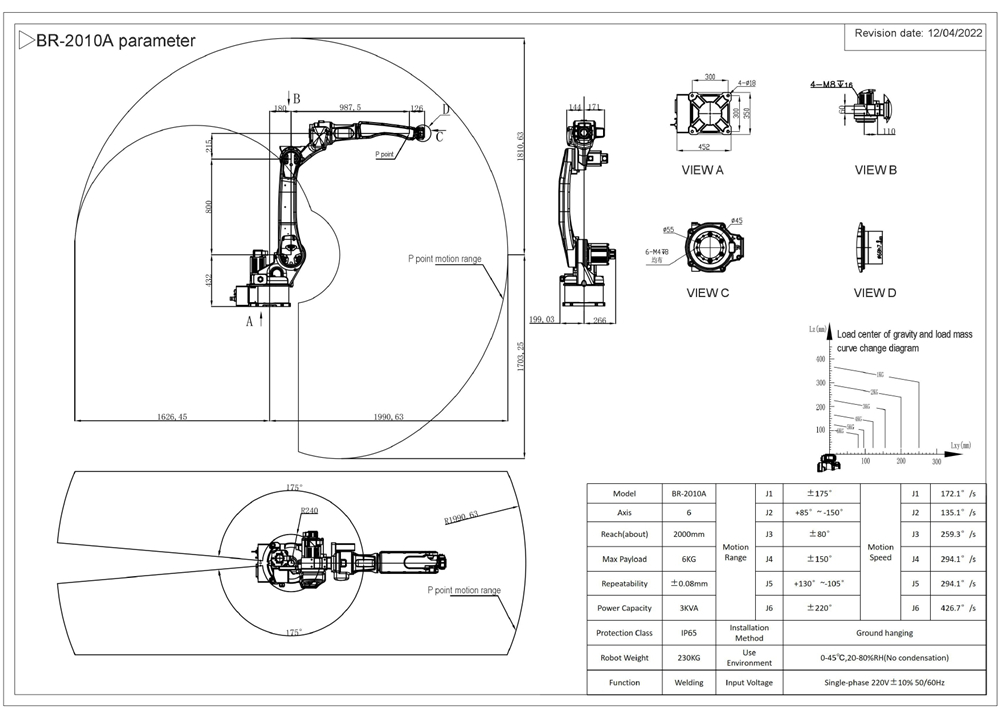
| แบบอย่าง | บีอาร์-2010เอ | ช่วงการเคลื่อนไหว | J1 | ±175° | ความเร็วในการเคลื่อนที่ | J1 | 172.1°/วินาที |
| แกน | 6 | J2 | +85°~ -150° | J2 | 135.1°/วินาที | ||
| เข้าถึง (ประมาณ) | 2000 มม. | J3 | ±80° | J3 | 259.3°/วินาที | ||
| น้ำหนักบรรทุกสูงสุด | 6 กก. | J4 | ±150° | J4 | 294.1°/วินาที | ||
| ความสามารถในการทำซ้ำ | ±0.08 มม. | J5 | +130°~-105° | J5 | 294.1°/วินาที | ||
| ความจุพลังงาน | 3 กิโลโวลต์แอมป์ | J6 | ±220° | J6 | 426.7°/วินาที | ||
| ระดับการป้องกัน | IP65 | วิธีการติดตั้ง | การแขวนพื้น | ||||
| น้ำหนักหุ่นยนต์ | 230 กก. | ใช้สภาพแวดล้อม | 0-45℃, 20-80%RH (ไม่มีการควบแน่น) | ||||
| การทำงาน | การเชื่อม | แรงดันไฟฟ้าขาเข้า | ไฟฟ้ากระแสสลับเฟสเดียว 220V±10% 50/60Hz | ||||
หมวดหมู่สินค้า
-

หุ่นยนต์เชื่อม MIG 6 แกน ลดสะเก็ดไฟ ระยะการทำงาน 1800 มม.
-

หุ่นยนต์เชื่อม MIG MAG 6 แกน ระยะการทำงาน 1500 มม. พร้อม...
-

หุ่นยนต์เชื่อมคุณภาพสูงใช้สำหรับเชื่อมเฟอร์นิเจอร์
-

แขนหุ่นยนต์ 6 แกน JHY สำหรับงานอุตสาหกรรม อัตโนมัติแบบอาร์ค...
-

หุ่นยนต์เชื่อมแบบยืดได้ 2000 มม. สำหรับเชื่อมเหล็กกล้าคาร์บอน...
-

หุ่นยนต์เชื่อม MIG ที่มีช่วงการทำงาน 2000 มม. สำหรับงานสแตนเลส...